In the field of intelligent robots, dexterous hand technology has always been considered the key to breaking through the barriers of human-robot collaboration. Recently, the F-TAC Hand, an intelligent dexterous hand jointly developed by the Beijing Institute of General Artificial Intelligence and Peking University, has been featured in the international authoritative journal Nature Machine Intelligence for its innovative achievements in high-resolution tactile perception and adaptive grasping ability. This achievement not only marks China's entry into the world's leading ranks in the field of robot end-effectors, but also indicates the acceleration of the commercialization process of general-purpose humanoid robots. In this article, China Exportsemi will systematically analyze the core competitiveness of F-TAC Hand and the far-reaching significance behind it from the dimensions of technical mechanism, R&D difficulties, performance, industrial value and future trends.
Ⅰ. Analysis of technical principles: the "hand of the machine" that integrates bionic and intelligence
The biggest highlight of the F-TAC Hand is its high-density tactile perception network covering about 70% of the palm surface. The "artificial skin" uses an integrated high-resolution pressure sensing array with a spatial resolution of up to 0.1 mm to recognize subtle surface textures, hardness and deformation, enabling dexterous hands to achieve human-level tactile capabilities. In the actual test, the F-TAC Hand can distinguish between different materials and elastic objects, such as rubber balls, foam blocks, glasses, etc., with a gripping force accuracy error of less than 5%.
In terms of control system, the dexterous hand adopts a strategy selection mechanism based on the generative model. Its core algorithm integrates probabilistic modeling and deep neural networks to generate optimal action strategies in different grasping scenarios. The team introduced a reinforcement learning framework, and the pre-trained model absorbed a large amount of scraped data, which has the ability to quickly adjust strategies in unknown scenarios. For example, when grabbing a small ball such as a ping-pong ball, which is prone to slipping, the system can dynamically adjust the fingertip contact force and posture to achieve a stable grip. This kind of flexible response ability is unmatched by traditional preset trajectory control.
Ⅱ. Breakthrough in R&D difficulties: collaborative optimization of structure and intelligent system
1. The challenge of fusing high-density sensors with structures
Deploying a large-area sensor array in a complex mechanical structure of dexterous hands faces a series of engineering challenges such as sensing unit arrangement, signal interference, and contact stability. To this end, the R&D team designed a flexible substrate material and a multi-layer wiring structure that allows the sensor to adhere to the surface and maintain good fatigue resistance. More importantly, the sensor structure is optimized by finite element simulation, so that the sensing unit can still maintain data stability under multi-joint motion. According to the paper, the design can maintain ≥95% signal accuracy in high-frequency (≥10 Hz) continuous gripping operations.
2. System tuning of complex control algorithms
With more than 20 degrees of freedom, the dexterous hand integrates haptic feedback to greatly increase the dimension and uncertainty of the system. To cope with this complexity, the team adopted a modular algorithm architecture to split and deploy functions such as action generation, contact perception, and strategy adjustment. Especially in the reinforcement learning stage, the algorithm undergoes millions of training iterations in a physical simulation environment (such as Mujoco and Isaac Gym), and finally realizes the seamless transfer of the strategy to the real world, overcoming the noise interference and latency challenges in "simulation to reality" (Sim2Real).
Ⅲ. Excellent performance: verify the reliability with experimental data
In a publicly available gripping test, the F-TAC Hand performed 600 dynamic gripping experiments on 20 target objects of various shapes and materials, with a 100% success rate, compared to only 53.5% with the traditional non-tactile dexterous hand. This difference is a testament to the key value of tactile perception in improving gripping stability.
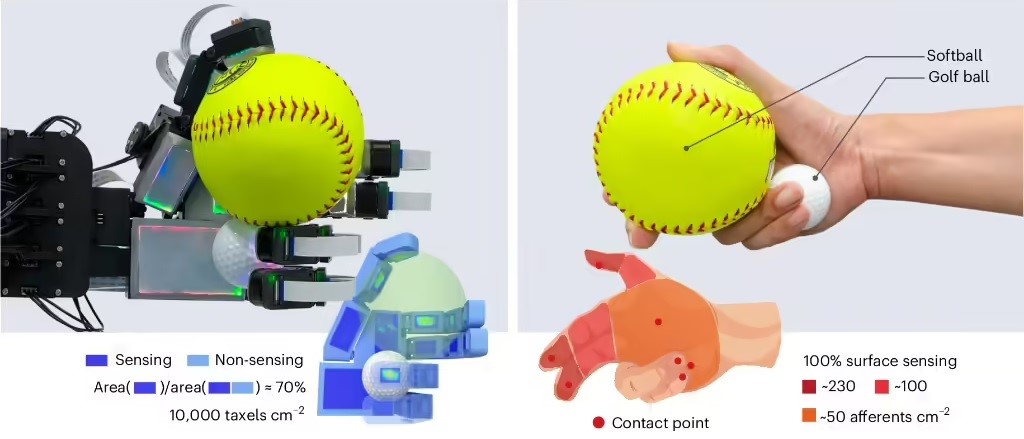
Figure: Comparison of the grasping action of the F-TAC Hand dexterous hand and the human hand
In the home scene simulation, the dexterous hand can smoothly operate daily necessities such as cups, books, keys, toys, etc.; In industrial application simulation, tasks such as screw gripping, component positioning, and assembly can be completed with a gripping accuracy of less than ±1 mm. This stability and generalization ability provide a realistic basis for its application in flexible manufacturing, assembly automation, precision logistics and other industries.
Ⅳ. The driving force of the industry is highlighted: a key step for technology to go to the market
1. Reconstruct the ecology of the robot industry chain
According to the "China Robot Industry Development Report (2024)", by 2030, the market size of China's intelligent robot end effector will exceed 45 billion yuan. As an extension of the robot's "tactile brain", the landing of high-performance products will drive the collaborative progress of upstream sensors, flexible electronic materials, integrated circuits and other industries. The core modules and sensors of F-TAC Hand have initially achieved a localized supply chain layout, which is expected to further reduce costs and enhance market competitiveness in the mass production stage.
2. Accelerate the commercialization of humanoid robots
The breakthrough of the dexterous hand has provided a decisive boost to the landing of humanoid robots. In manufacturing scenarios, robots equipped with F-TAC Hand can undertake complex assembly and precision inspection tasks, effectively replacing labor-intensive or high-risk positions. In the service and family scenarios, it can be competent for detailed actions such as feeding, opening doors, and holding medicines, and has situational awareness and human-computer interaction capabilities, providing a feasible path for home care and elderly assistance.
Ⅴ. Far-reaching social impact: Promote human-machine collaboration and intelligent ethical thinking
1. Reshape human production and lifestyle
The launch of F-TAC Hand not only improves the physical operation ability of robots, but also opens up a new dimension of collaboration between robots and humans. In the medical field, doctors can use it to carry out remote control and fine surgical operations; In the educational scenario, robot teachers with interactive ability will become an effective carrier for children's science popularization.
2. Promote the integration and development of human and machine intelligence
The level of "human-like intelligence" embodied in F-TAC Hand prompts us to think about the evolution of the human-machine boundary. Rather than robots imitating humans, humans are extending the boundaries of their capabilities through intelligent technology. Machines are no longer just tools, but "agents" that work in tandem with humans at multiple levels, such as execution, learning, and decision-making. This synergistic relationship will give birth to new organizational forms, labor structures and social governance models.
Ⅵ. Future development trend: intelligent dexterous hands lead the era of ubiquitous intelligence
The advent of the F-TAC Hand is only the first step in the development of intelligent and dexterous hands. In the future, related technologies will continue to evolve in the following directions:
* Multi-modal perception fusion: Combine visual, sound, temperature and other sensors to build a more comprehensive environmental understanding capability;
* Evolution of flexible structures: the introduction of bionic muscles and smart materials to achieve more natural movements and safer human-machine contact;
* Brain-computer interface collaborative control: direct control of the dexterous hand through nerve signals to achieve "mind control", making it an extension of human limbs;
* Large model-driven generalization capability: Combining large language models and general action models, a dexterous hand system with the ability to independently plan complex tasks is constructed.
Conclusion: Starting from intelligent dexterous hands, we will move towards a new era of wisdom
The success of F-TAC Hand is not only a leap forward in technology, but also a sign that China has achieved "from following to leading" in the field of robot intelligent terminal systems. It has injected new innovation impetus into domestic robot companies, and also injected certainty and confidence into the commercialization of global humanoid robots.
In the future, as smart dexterous hands gradually become practical and popular, they will take root in multiple scenarios such as medical care, manufacturing, education, and home care. It is foreseeable that a new era in which the "hand of the machine" empowers the "human brain" is accelerating.